Intelligentere Sensoren zur Bewältigung von Aufgaben bei autonomen Weltraummissionen
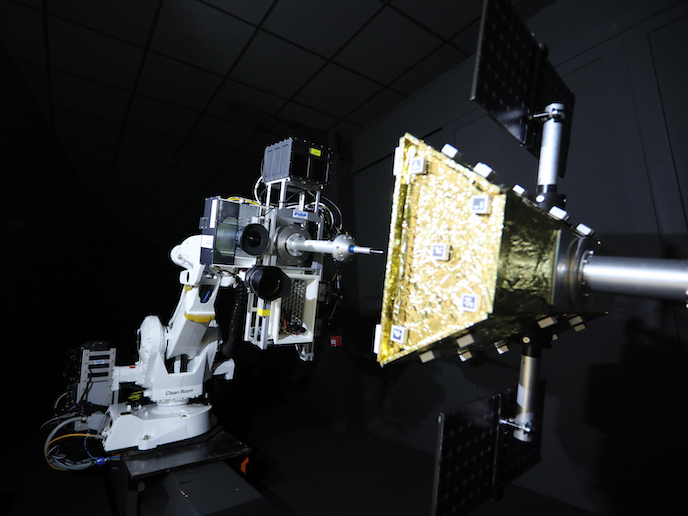
Reparaturen, Nachlieferungen sowie die Betankung von Satelliten in der Umlaufbahn und Erkundungsmissionen mithilfe von Planetenrovern erfordern nicht nur nahezu menschliche Fähigkeiten und Geschicklichkeit, sondern müssen gleichzeitig auch autonom ablaufen. „Manchmal hilft dabei die Bodenkontrollstation, da sich diese näher an der Erde befindet und daher bessere Kommunikationsmöglichkeiten bietet. Im Weltraum hingegen gibt es eine gewisse Zeitverzögerung, sodass sichergestellt werden muss, dass das System die Planung der Mission durchführen und Entscheidungen eigenständig treffen kann“, erklärt I3DS-Projektmanagerin Sabrina Andiappane, Leiterin der Forschungs- und Entwicklungsstudie und Ingenieurin für zukünftige Projekte bei Thales Alenia Space in Cannes, Frankreich. Einzelne Sensoren, die zur Navigation sowie auch zu anderen Zwecken dienen, werden häufig kommerziell hergestellt und verfügen normalerweise über eine eigene proprietäre Schnittstelle und Software. Das EU-finanzierte Projekt I3DS hat modernste Sensoren und Detektoren, die bei solchen Missionen zum Einsatz kommen, in einem einzigen Paket zusammengefasst und die Software zur Verbesserung der Rückmeldungen in Echtzeit und der Verarbeitung der kombinierten Daten für den Betrieb von Robotersystemen optimiert. Es umfasst Daten von visuellen Sensoren wie hochauflösenden, 3D- und thermischen Infrarotkameras; Sternsensoren, die ein Fahrzeug anhand der Sterne ausrichten; Kontakt- und Tastsensoren, die Hindernisse erkennen; und Fernsensoren wie Radar und Lidar. Darüber hinaus enthält das Projekt auch Beleuchtungsvorrichtungen zur Verwendung bei Finsternissen oder mangelndem Sonnenlicht. Ein Planetenrover benötigt all diese Sensoren zum Beispiel, um in die richtige Richtung zu fahren und Hindernisse zu umgehen. Modulsystem „Hierbei handelt es sich um intelligente Sensoren für intelligente Missionen mit Funktionen zur Datenvorverarbeitung in den Kameras. Außerdem können die Daten besser verstanden werden, wenn sie in ein anderes System eingespeist werden.“ Die Sensoren müssen zum einen synchronisiert und mit einer bestimmten Frequenz betrieben werden und zum anderen müssen die Algorithmen so schnell arbeiten, um in Echtzeit ausgeführt werden zu können. „Es war eine Herausforderung, all dem gerecht zu werden“, sagt sie. Ziel ist, eine höhere Genauigkeit zu erzielen, als dies mit den einzelnen Sensoren allein möglich wäre. Daher wurden Fachleute für Datenfusion und -verarbeitung hinzugezogen, um die verschiedenen Architekturen im Hinblick auf die gesamte Robotersystemarchitektur zu spezifizieren, zu entwerfen, zu integrieren und zu testen. Die integrierte Plattform wurde als ein „Plug-and-Play“-Modulsystem entwickelt. „Es gibt eine Reihe von Sensoren, aus denen man frei wählen kann. Auch wenn die Sensoren miteinander vertauscht werden, wird die Funktionsfähigkeit dadurch nicht beeinträchtigt.“ „Was wir bislang nicht vollständig integrieren konnten, ist Radar, da hier spezielle Sicherheitsbestimmungen beim Testen gelten. Dies hatte zur Folge, dass es nicht mehr während des Projektlebenszyklus umgesetzt werden konnte“, erklärt Andiappane. Steuereinheit Die Steuereinheit für die Instrumente, die mit all den verschiedenen Sensoren verbunden ist und die richtigen Befehle in derselben Software-Umgebung sendet, ist ein 233 x 160 mm großes Motherboard. „Wir haben bewiesen, dass das System funktioniert. Um es bis in den Weltraum zu schaffen, sind jedoch offensichtlich noch weitere Entwicklungen notwendig. Bei Weltraummissionen muss die gesamte Elektronik strahlungsresistent sein“, fügt sie hinzu. Parallel zu I3DS wurden durch die EU noch weitere Projekte im Bereich Weltraumrobotik gefördert. Als Mitglied des Folgeprojekts European Robotic Orbital Support Services (EROSS) erklärt Andiappane: „Wir werden weiterhin an der Integration der verschiedenen Bausteine, wie beispielsweise den Sensoren, und der anderen Frameworks wie der Navigation arbeiten, um die Wartung im Orbit in einem noch größeren (Roboter-)System zu demonstrieren.“