Sensores más inteligentes para tareas autónomas en misiones espaciales
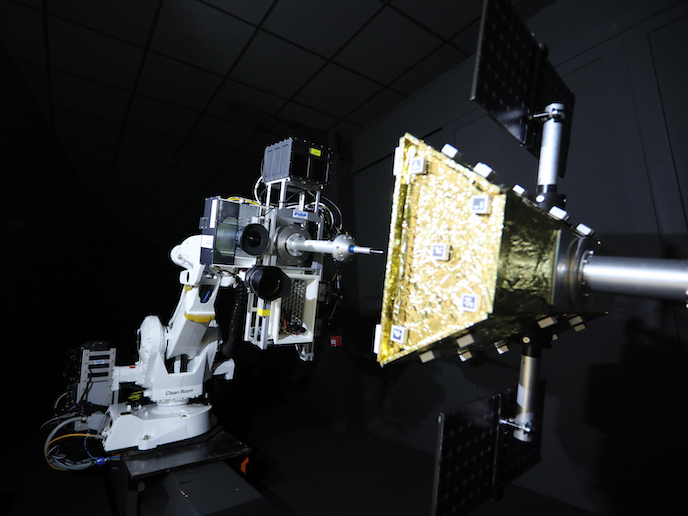
Las reparaciones, el reabastecimiento y el repostaje de los satélites en órbita y las misiones de exploración de los róveres planetarios requieren niveles de habilidad y destreza similares a los de los seres humanos al tiempo que operan de forma autónoma. «En ocasiones, el control [terrestre] ayuda, más cerca de la Tierra, donde la comunicación es más fácil. Pero en el espacio existe un retardo, por lo que es necesario asegurarse de que el sistema pueda planificar la misión y tomar decisiones por sí mismo», explica la coordinadora del proyecto I3DS, la señora Sabrina Andiappane, directora de estudios de investigación y desarrollo e ingeniera de proyectos futuros de Thales Alenia Space, en Cannes, Francia. Los sensores individuales empleados para navegación y otros fines a menudo se producen comercialmente, por lo general con su propia interfaz y «software» patentados. El proyecto I3DS, financiado con fondos europeos, ha integrado sensores y detectores de última generación utilizados en misiones espaciales para crear un conjunto único y, además, ha optimizado el «software» para mejorar la retroalimentación en tiempo real y el procesamiento de datos combinados para operar sistemas robóticos. El sistema incluye datos de sensores visuales, como cámaras infrarrojas térmicas, tridimensionales y de alta resolución; sensores estelares que guían a un vehículo utilizando las estrellas; sensores táctiles y de contacto que detectan un obstáculo; y sensores remotos, como el radar y el lídar. También incluye dispositivos de iluminación para su uso durante eclipses o en ausencia de luz solar. Por ejemplo, un róver planetario necesita todos los sensores para asegurarse de que avanza en la dirección correcta y evitar obstáculos. Sistema modular «Estos son sensores inteligentes para misiones inteligentes, con preprocesamiento para las cámaras, y los datos son más fáciles de interpretar cuando se incorporan a otro sistema». Los sensores deben estar sincronizados, funcionar a una frecuencia determinada, y los algoritmos deben ejecutarse con bastante rapidez para alcanzar la operabilidad en tiempo real. «Lograrlo constituyó todo un reto», comenta Andiappane. El objetivo es alcanzar una mayor precisión en comparación con cualquiera de los sensores por separado. Esto supuso la participación de especialistas en fusión de datos y capacidad de procesamiento para especificar, diseñar, integrar y evaluar las diferentes arquitecturas en la arquitectura global del sistema robótico. La plataforma integrada se ha desarrollado como un sistema modular «enchufar y usar». «Hay un conjunto de sensores disponibles y se puede elegir el que se desee. Se puede cambiar un sensor por otro y el sistema seguirá funcionando». «Lo que no pudimos integrar completamente es el radar, que está sujeto a normas de seguridad especiales para las pruebas. Esto significa que no pudo realizarse durante la duración del proyecto», explica Andiappane. Unidad de control La unidad de control del instrumento, que interactúa con todos los sensores y envía las órdenes correctas en el mismo entorno de «software», es una placa base de 233 x 160 mm. «Hemos comprobado que el sistema funciona, pero obviamente es necesario un desarrollo ulterior antes de enviarlo al espacio. Para las misiones espaciales, todos los componentes electrónicos tienen que ser resistentes a las radiaciones», añade Andiappane. La Unión Europea ha financiado varios proyectos en materia de robótica espacial en paralelo con I3DS. Como parte del proyecto de continuación EROSS (European Robotic Orbital Support Services), Andiappane concluye: «Integraremos mejor los diferentes componentes principales, por ejemplo, los sensores, y los otros módulos, como el de navegación para crear un sistema [robótico] aún más grande a fin de demostrar labores de mantenimiento en órbita».